Българските роботи могат всичко
Вижте в Sandacite.BG защо българските роботи могат всичко!

Това четиво от Сандъците – Sandacite ще Ви запознае с първите произведени в България роботи – от всякакъв вид и характер. Предлагаме екскурзията във времето да започне сега!
Има доста определения за понятието промишлен робот. Но с каквито и думи да наричане нещата, истината остава винаги една — става дума за имитация на човешки действия. Или по-точно — замяната на човешката дейност с помощта на машини. Промишленият робот трябва да замени човека там, където за него няма място — под земята, в завода, под водата, във въздуха, в Космоса и така нататък. Списъкът на страните-производителки на промишлени роботи е твърде кратък — този факт също не се нуждае от подробно обяснение. Казано с едно изречение, тяхното производство е много сложно и скъпо. Но веднъж произведени, промишлените роботи бързо се „откупват“ и ефектът от тяхното внедряване е повече от очевиден.
От 1979 година и България намира място в споменатия кратък списък на страните-производителки на промишлени роботи. Нещо повече – нашата страна е с ранг на координатор в СИВ в това направление. Във връзка с изготвените планове за роботизация у нас са разработени т.н. еталонни работни места, в които да се прилагат промишлените манипулатори и роботи. Идеята е изделията на Комбината за промишлени роботи ,,Берое“ в Стара Загора бързо да намерят своето място в производствената сфера. Идеята е била течение на времето все повече работни места да бъдат еталонизирани и адаптирани към възможностите на произвежданите у нас промишлени роботи и манипулатори.

Говорейки за българските роботи, не можем да не споменем една твърде интересна особеност, отнасяща се до тяхната конструкция. В световното производство на роботи тогава са оформени три конструктивни тенденции. Първата е свързана с производството на универсални роботи и се развива най-вече от САЩ. Универсалният робот има редица предимства – лесна адаптация към околната среда (респективно смяната на операциите), притежава голяма гъвкавост по отношение на програмирането. За съжаление, цената му свежда до нула положителните черти. Единственият изход от това деликатно положение е производството на големи серии, което намалява значително цената, но по времето на зараждането на българските промишлени роботи това е все още въпрос на по-близко или по-далечно бъдеще.
Другата тенденция в роботиката е свързана с производството на специализирани роботи. През 70-те години нея залагат най-често японските производители. Роботите от този вид са със значително намалени възможности и минимален брой степени на свобода, имат опростено управление и сравнително ниска цена. За сметка на това те трудно се преустройват и се налага разработването на широка номенклатура, което затруднява кзкто самото производство, така и обслужването и ремонта.

Във всяко нещо съществува така наречената „златна среда”. Роботиката не прави изключение от това старо правило. Златната среда в случая е изграждането на модулни роботи. Това е именно пътят, избран от българските специалисти. В този случай различните по вид и тип роботи се монтират от произвежданата гама модули. Степента на унификация в този случай достига 80 процента, което е отлично постижение в тази област. Така роботът става максимално универсален, като запазва ниската си цена. Но какво по-точно представляват българските роботи ? Нека за по-голяма простота се опитаме да ги класифицираме по тяхната сложност.

На снимката: промишлен робот РБ210
ПНЕВМАТИЧНО БАЛАНСИРАНИ РЪЧНИ МАНИПУЛАТОРИ. Този тип манипулатори са произвеждани в четири варианта с товароподемност до 250 килограма. Те намират широко приложение в ковашко-пресовото и щамповъчното производство, като осигуряват пълно механизиране на спомагателните операции при повдигане и транспортиране на товари, детайли и възли. Усилието, което е необходимо за задвижването на ръчните манипулатори, не надвишава 5 килограма, което значително облекчава труда в редица тежки ме само в преносния смисъл на думата производства.
ПОРТАЛНИ МАНИПУЛАТОРИ ПИРИН. Те са разработени в продуктова фамилия с товароподемност до 40 килограма. В зависимост от конструктивното решение имат точност при изпълнение на операциите (така нареченото позициониране) около половин милиметър и се използват при автоматично захранване с ротационно-симетрични детайли на редица програмни металорежещи машини. Хидравличното задвижване и твърдото програмно управление на този вид манипулатори осигурява значителни икономически и експлоатационни предимства.
СТОЯЩИ МАНИПУЛАТОРИ ПИРИН. Произвеждани са в четири модификации, като различните варианти са построени на агрегатния принцип. Те имат точност на позициониране около половин милиметър и товароподемност до 20 килограма. Стоящите манипулатори от фамилията Пирин са използвани за захранване на металорежещите машини с къси ротационни детайли. Те имат електрохидравлично задвижване и автоматично управление, като е предвидена и възможност за ръчни корекции.

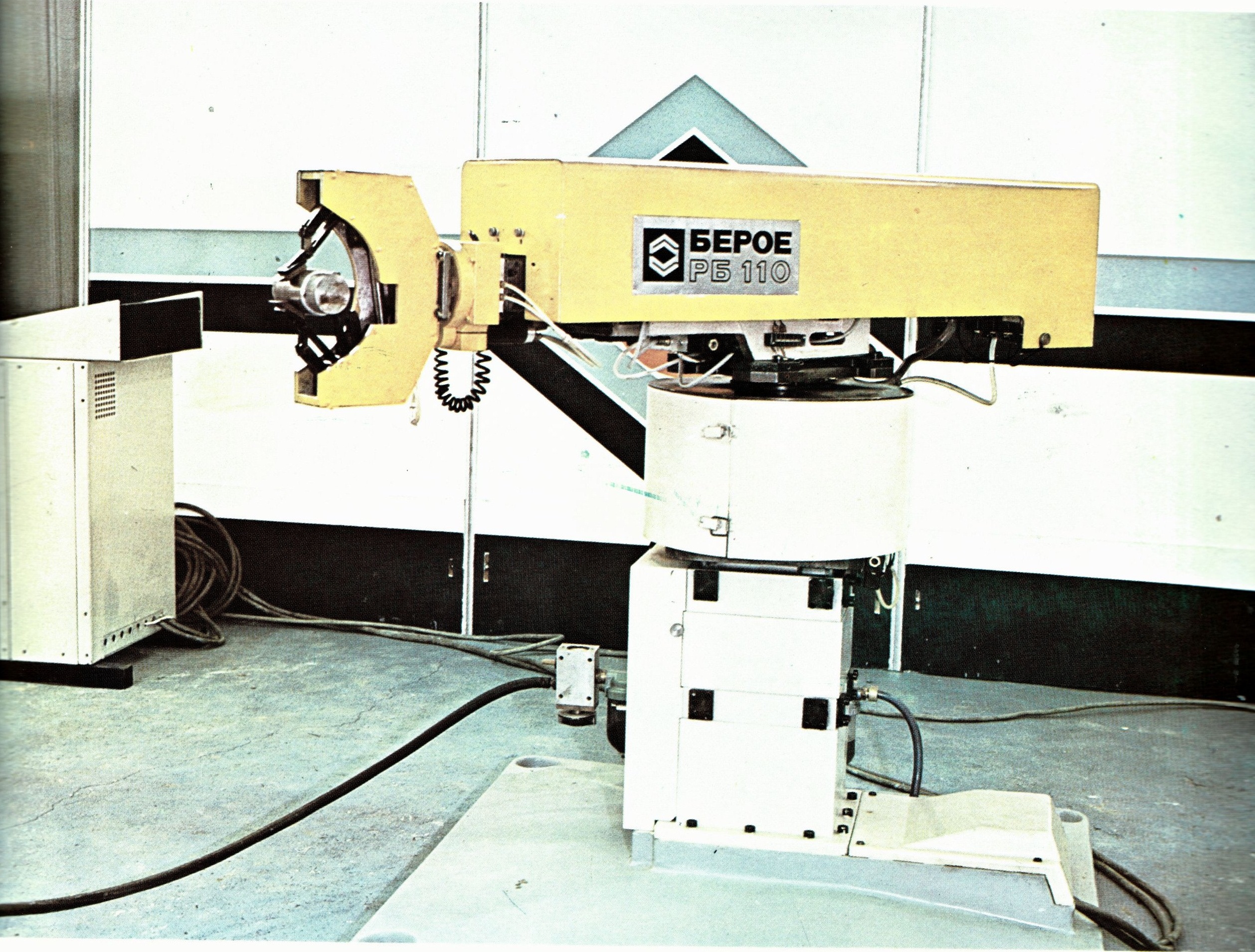
ПРОМИШЛЕНИ РОБОТИ РБ 110 (на първата снимка). Имат четири степени на свобода и при максимална товароподемност 10 килограма имат точност на позициониране около половин милиметър. Те служат за автоматизиране на спомагателните операции з машиностроенето и някои други области на производството като получаването на пластмаси, стъкло, керамика. Промишлените роботи от серията 110 се задвижват пневматично и се управляват дистанционно, което гарантира максимална безопасност на обслужващия персонал. Програмирането им се осъществява стъпка по стъпка, което е твърде удобно от практическа гледна точка. Управляващият електронен блок работи в три режима: „Програмиране“, „Работа“ и „Проверка на паметта“, като последният режим гарантира точността на зададената програма във всеки момент по време на експлоатацията.

ПРОМИШЛЕНИ РОБОТИ РБ 210. Те имат шест степени на свобода — максимална цифра в световната производствена практика, като конструкцията е изградена от въртящи се кинематични двойки. При товароподемност до 15 килограма имат точност на позициониране около 5 милиметра. Този вид български роботи имат електрохидраалично задвижване и работят в сферична координатна система. Основното им предназначение е да нанасят прахообразни покрития и бои. В паметта на роботите от фамилията 210 могат да се запишат до 75 паралелни програми с продължителност на технологичните операции до 900 секунди, като прехвърлянето от една програма на друга става само за 3 секунди. Интересното тук е, че роботът се обучава ръчно на така наречена учебна скорост, като операторът имитира необходимата технологична операция, която се запомня от паметта. След това управлението се превключва ка работна скорост, която е няколко пъти по-висока от учебната. Този вид програмиране осигурява големи удобства при експлоатация и е много евтин, защото не се използува математическо осигуряване.

ПРОМИШЛЕНИ РОБОТИ РБ 230. Това са най-усъвършенстваните роботи от серията. Те да използвани за автоматизиране на основните и спомагателните технологични операции. При товароподемност до 600 килограма те имат точност на позициониране около един милиметър, Този вид роботи също имат шест степени на свобода и работят в цилиндрична координатна система. Управляват се от цифрова програма, като за тази серия Институтът по техническа кибернетика и роботика към БАН е разработил усьвършенствано микропроцесорно управляващо устройство, създадено изцяло с български елементи!
С един още по-усъвършенстван, макар и по-късен български робот, можете да се запознаете ТУК.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Вашият коментар